Eurobot 2002Participation de l'Université de Liège |
Contexte et Objectifs du projet
Robotique ...
Les robots mobiles fournissent une plate-forme intéressante pour beaucoup de domaines de recherche. Il existe des exemples d'application depuis les sciences appliquées -planification de trajectoires, apprentissage- jusqu'à la biologie ou les sciences sociales -interaction entre des individus similaires, comportement en colonie, ... Indépendamment des domaines de recherche, nous pouvons dire que la robotique est à l'intersection entre la mécanique, l'électronique et l'informatique.
Le projet Eurobot prend part dans un projet de recherche plus large, se développant au département Montefiore. Ce projet vise à développer une équipe de petits robots mobiles capables de s'échanger un ou plusieurs ballons en respectant un ensemble de règles : ballons frappés (comme au football ou au hockey) ou ballons lancés (comme au volley ou dans une figure de jonglerie). Dans un premier temps les axes prioritaires de recherche portent sur a) le développement de lois de contrôle adaptés à la réalisation de tâches dynamiques coordonnées, b) la mise en "réseau" de systèmes embarqués identiques, c) le développement d'algorithmes d'apprentissage automatique distribués en environnements multi-agents.
Notre équipe était composée d'une douzaine de
chercheurs et de d'étudiants provenant d'orientations diverses :
mécanique, électronique, informatique.
Objectifs
et Esprit de participation

Cette première participation à une compétition de robotique devait représenter des bases solides pour la suite. Depuis le début, la participation 2002 a été entreprise dans l'idée de reprendre part les années suivantes. De ce point de vue, nos avons fait attention à développer des architectures robustes et modulable, réutilisable par la suite.
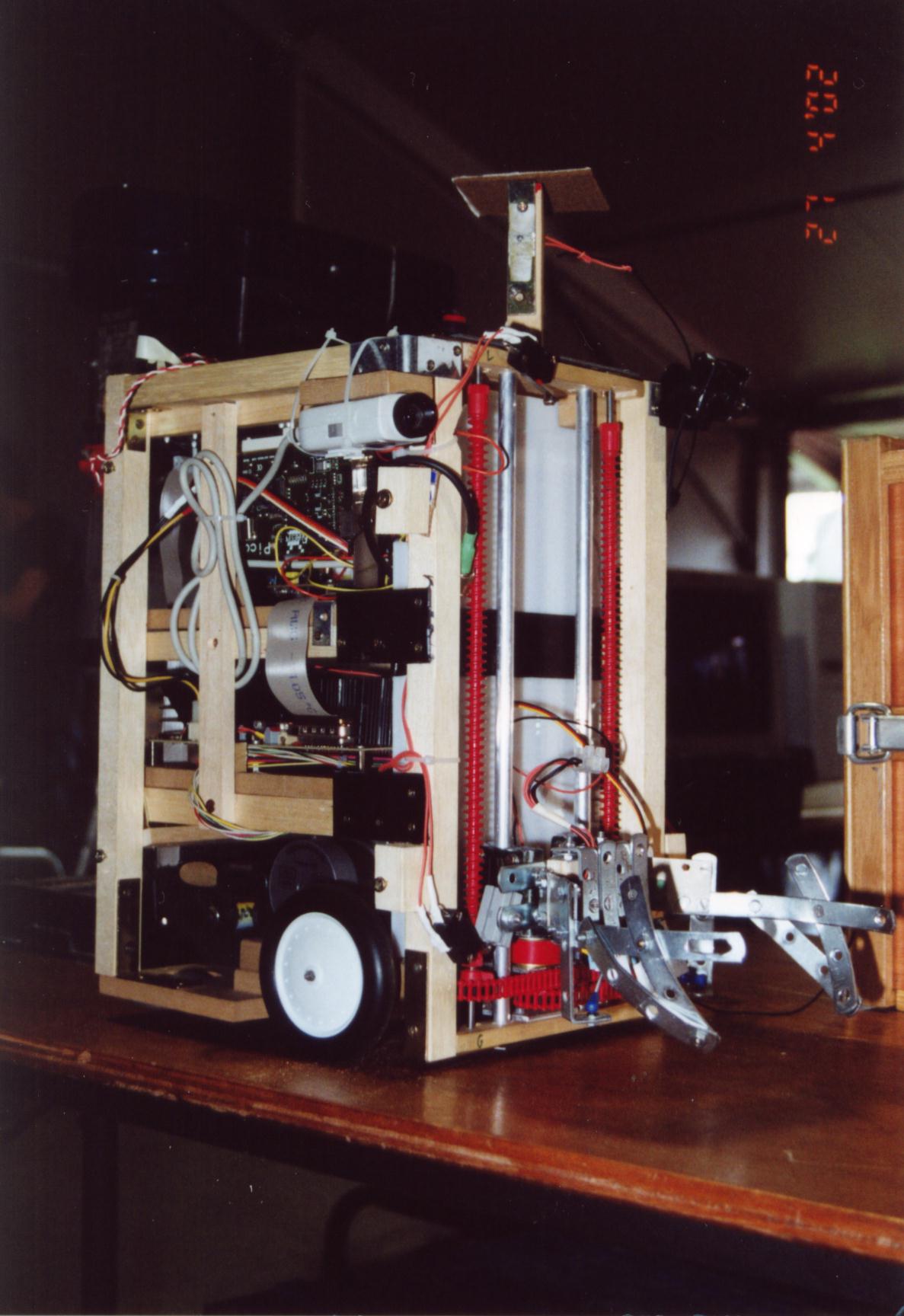
Pour cette première participation, nos objectifs étaient de construire
un robot capable de jouer un match et encore mieux de terminer parmi
les trois premiers en Belgique (et de gagner ainsi notre billet pour
la phase internationale de la compétition). Nos objectifs ont été
achevés : nous avons gagné la Coupe de Belgique et terminé dans le
top dix en France.
Eurobot : Contexte et Règles
Le contexte
La première édition de la Coupe de Belgique de robotique a été organisée par le Parc d'Aventures Scientifiques (PASS) et les Jeunesses Scientifiques Belges (JSB); elle s'est déroulée les 27 et 28 avril 2002. Ce défi ludique, scientifique et technique est proposé aux étudiants des universités et des écoles d'ingénieurs ainsi qu'à des clubs indépendants. Les trois premières équipes belges ont gagné leur qualification pour participer au 5ème concours international EUROBOT , qui s'est déroulé en France. Si les règles changent chaque année, l'esprit de la compétition reste le meme : l'échange et la confrontation de savoir-faire dans un esprit convivial et sportif. C'est l'occasion pour les passionnés de construire des solutions originales dans des domaines aussi différents que la mécanique, l'électronique, la vision ou l'intelligence artificielle.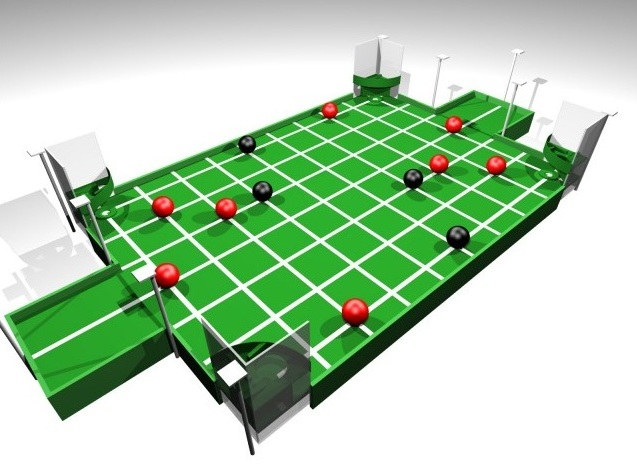
Le thème de l'Eurobot 2002 était le billard aérien. La figure ci-dessous représente l'aire de jeu sur laquelle s'affrontent deux robots.
En un temps imparti, chaque robot, complètement autonome,
doit placer un maximum de boules rouges dans les poches du coté adverse et de boules
noires dans les poches de son camp. A noter que les poches sont en hauteur et qu'il faut
soulever les balles pour marquer un point.
La vitesse est une contrainte importante car le jeu ne dure que 1'30" !
Les règles complètes peuvent être trouvées sur le site d'Eurobot :
www.anstj.org/robot/concours/eurobot/garde_en.html .
Documentation - Site internet
Site web
Un site web est dédicacé à la participation à l'Eurobot 2002 : www.boniver.net/~eurobot .Rapport
Un document reprend le travail accompli durant un an pour la préparation de l'Eurobot 2002. Celui-ci reprend aussi bien les aspects techniques de la préparation -mécanique, électronique, informatique- que les aspects logistiques -organisation, horaire, évolution du projet, ...
Version "ps" du the document : report.tar (3.6 M)
dernière modification : 28.08.2000
Auteur: Fabien DEFAYS